Abstract
World models are rapidly becoming a core infrastructure for embodied intelligence and interactive agents: they provide controllable simulators in which agents can perceive, act, forecast, and acquire scalable experience. Yet current video generation world models are still organized around isolated control interfaces, such as camera trajectories, robot actions, or hand-joint signals. This fragmentation is increasingly a scaling bottleneck. The central challenge is not the absence of controllable generators, but the lack of a unified and extensible learning framework that can absorb heterogeneous action supervision while preserving a shared model of world dynamics. In this work, we introduce Worldscape-MoE, a Mixture-of-Experts world model built on Diffusion Transformers for scalable heterogeneous action control. Our key observation is that different controls specify different interfaces to the same underlying world: although their representations differ, they constrain shared physical regularities, scene dynamics, and interaction semantics. Worldscape-MoE operationalizes this observation through modality-aware control injection, shared and control-specific experts, and a progressive MoE tuning strategy that supports continual extension to new action modalities. Experiments across locomotion, robotic manipulation, and egocentric hand control show that heterogeneous supervision improves rather than interferes with individual control capabilities. Worldscape-MoE achieves strong results on WorldArena, improves locomotion and hand-control metrics, exhibits robust out-of-distribution generalization, and demonstrates scaling behavior as additional control data and experts are integrated.
Contributions
01
We formulate heterogeneous action-control world modeling as a scaling problem and identify the key obstacle as the lack of a unified learning framework rather than the lack of individual control models.
02
We propose Worldscape-MoE, a DiT-based world model that combines modality-aware control injection, shared experts, and control-specific experts to learn from locomotion, robotic manipulation, and egocentric hand-control data in one architecture.
03
We present Worldscape-MoE Tuning, a progressive and extensible training procedure that allows the shared expert to absorb cross-control world knowledge while new experts specialize to newly introduced control modalities.
04
We conduct extensive experiments across heterogeneous control performance, expert routing, MoE effectiveness, scalability, out-of-distribution generalization, and coupled loco-manipulation. The results show consistent gains over dense mixed training and strong performance on manipulation, locomotion, and hand-motion evaluations.
Overview
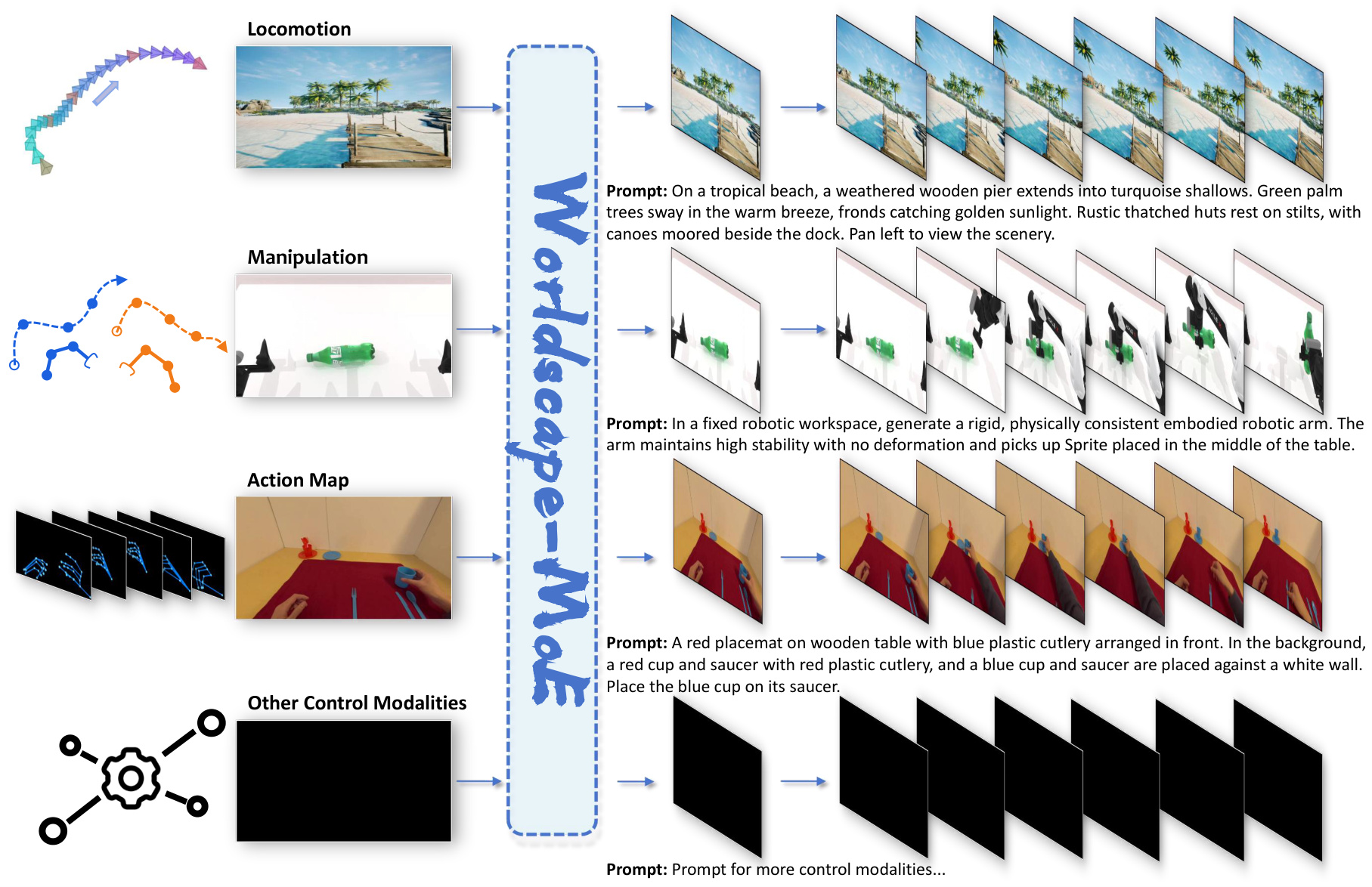
Figure 1: Worldscape-MoE Overview. Worldscape-MoE supports three mainstream control modalities: Locomotion for trajectory-conditioned world navigation, Manipulation for robot-action-conditioned embodied tasks, and Action Map for hand-joint-conditioned egocentric interaction generation. The framework can also be extended to additional control injection settings.
Method
Worldscape-MoE unifies heterogeneous control signals in one diffusion-transformer world model by using a control-aware Mixture-of-Experts design. During training, each sample is routed through a shared expert plus the corresponding modality expert, enabling cross-modality world knowledge sharing and control-specific specialization at the same time.
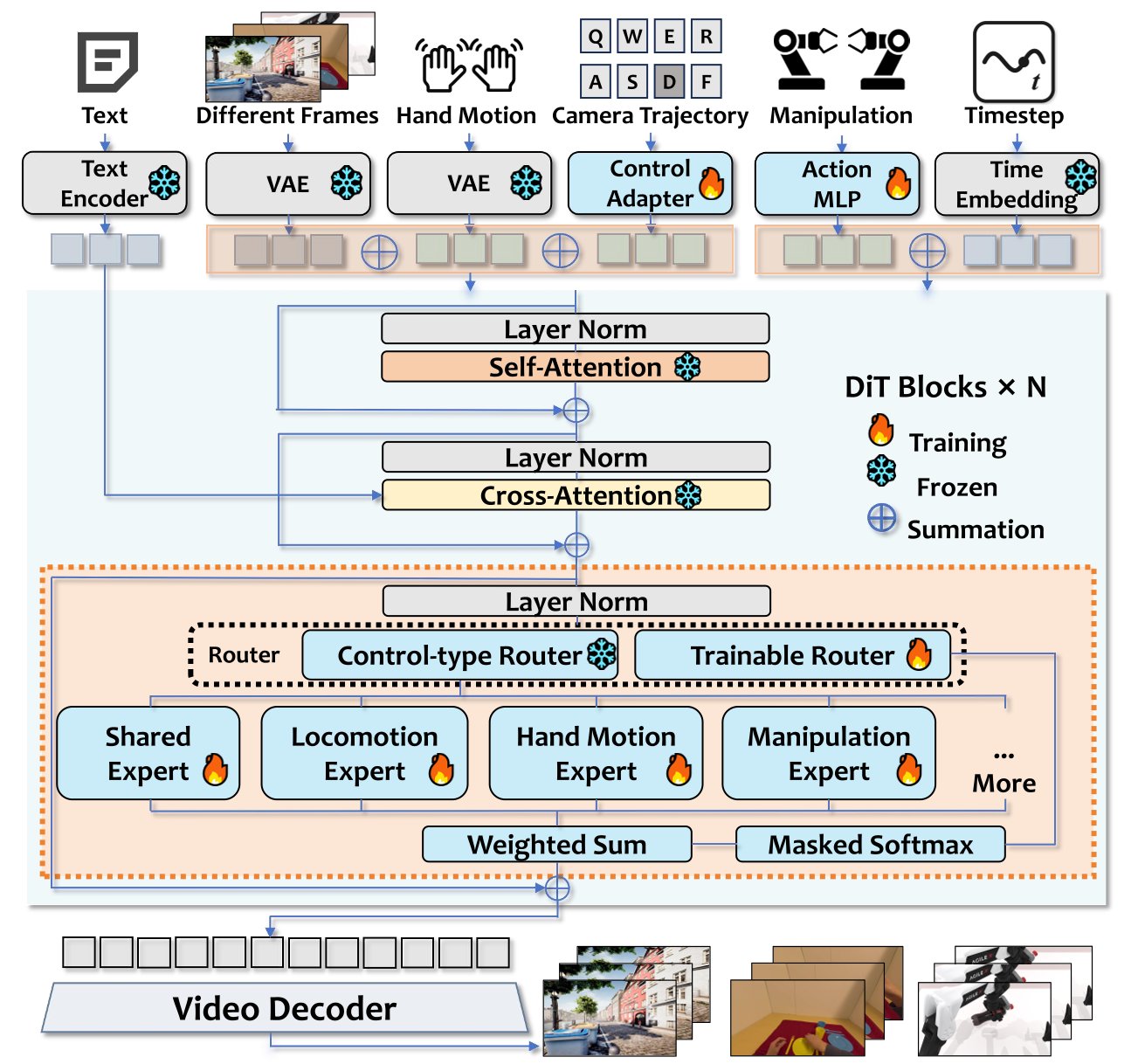
Figure 2: Worldscape-MoE Architecture. Given the current world observation and different forms of supervisory control, our framework generates world dynamics under heterogeneous control signals. It supports both egocentric world exploration and embodied task execution.
Video Showcase
Out of Distribution
W/O MoE Comparison
Locomotion Comparison
Hand Motion Comparison
Physics Consistency
Loco-Hand Motion/Manipulation
Quantitative Results
Locomotion Experiments
| Method | Avg | Brightness | Color Temp | Sharpness | Motion | Smoothness | Trajectory Accuracy |
|---|---|---|---|---|---|---|---|
| Worldscape-MoE | 0.7556 | 0.6955 | 0.7758 | 0.7639 | 0.6745 | 0.9941 | 0.6300 |
| w/o MoE | 0.6869 | 0.6710 | 0.6993 | 0.6613 | 0.4865 | 0.9930 | 0.6100 |
| Matrix-game 3.0 | 0.6232 | 0.5633 | 0.6180 | 0.6353 | 0.3852 | 0.9660 | 0.5714 |
| HY-World 1.5 | 0.7322 | 0.7128 | 0.7027 | 0.7477 | 0.5545 | 0.9908 | 0.6844 |
| CameraCtrl | 0.5521 | 0.4602 | 0.4812 | 0.3076 | 0.4833 | 0.9832 | 0.5970 |
| MotionCtrl | 0.5562 | 0.4583 | 0.5296 | 0.2421 | 0.5182 | 0.9776 | 0.6115 |
| CamI2V | 0.6137 | 0.5150 | 0.5904 | 0.4513 | 0.5255 | 0.9886 | 0.6115 |
| RealCam-I2V | 0.7063 | 0.6530 | 0.5712 | 0.6197 | 0.6987 | 0.9901 | 0.7050 |
| VideoX-Fun-Wan | 0.7443 | 0.6684 | 0.6856 | 0.6640 | 0.6934 | 0.9899 | 0.7645 |
| AC3D | 0.7262 | 0.4884 | 0.7764 | 0.7050 | 0.7213 | 0.9934 | 0.6729 |
| ASTRA | 0.6072 | 0.5600 | 0.5916 | 0.5088 | 0.5625 | 0.9826 | 0.4379 |
Manipulation Experiments
| Model | EWM Score |
|---|---|
| Worldscape-MoE | 62.84 |
| w/o MoE | 61.88 |
| CtrlWorld | 59.98 |
| Wan 2.6 | 59.80 |
| CogvideoX | 58.79 |
| Veo 3.1 | 57.77 |
| IRASim | 56.14 |
| TesserAct | 54.62 |
| Cosmos-Predict 2.5 (action) | 54.29 |
| Cosmos-Predict 2.5 (text) | 53.06 |
| Vidar | 51.92 |
| Wan 2.2 | 51.71 |
| GigaWorld-0 | 50.96 |
| RoboMaster | 50.35 |
Hand Motion Experiments
| Model | FID-VID | FVD | FID | Image Quality |
|---|---|---|---|---|
| Worldscape-MoE | 3.80 | 110.94 | 5.78 | 0.7325 |
| w/o MoE | 5.39 | 128.87 | 15.34 | 0.7250 |
| HunyuanVideo-1.5 | 23.18 | 517.42 | 56.31 | 0.6419 |
| Cosmos-Predict 2.5 | 15.02 | 628.96 | 51.36 | 0.6158 |
| MimicMotion | 26.74 | 589.47 | 48.92 | 0.5324 |
| MagicDance | 65.93 | 1498.65 | 91.78 | 0.5739 |
| LOME | 144.58 | 1794.84 | 67.82 | 0.5281 |
Visual Motion and Consistency Metrics
| Model | Image | Aesthetic | JEPA | Dynamic | Flow | Smoothness | Subject | Background | Photometric |
|---|---|---|---|---|---|---|---|---|---|
| Worldscape-MoE | 0.4566 | 0.3795 | 0.8920 | 0.4373 | 0.2632 | 0.7717 | 0.8333 | 0.9043 | 0.1439 |
| w/o MoE | 0.5220 | 0.4053 | 0.8779 | 0.4432 | 0.2457 | 0.7776 | 0.8282 | 0.8990 | 0.1126 |
| GigaWorld-0 | 0.5041 | 0.3991 | 0.4413 | 0.6709 | 0.3118 | 0.7811 | 0.7303 | 0.8563 | 0.1756 |
| TesserAct | 0.3322 | 0.4590 | 0.4579 | 0.5150 | 0.2447 | 0.7579 | 0.8250 | 0.9238 | 0.2491 |
| RoboMaster | 0.3487 | 0.3842 | 0.2966 | 0.6124 | 0.1484 | 0.6940 | 0.8295 | 0.9123 | 0.3356 |
| Vidar | 0.4145 | 0.4068 | 0.5608 | 0.2767 | 0.1426 | 0.7973 | 0.7629 | 0.8300 | 0.2350 |
| Cosmos-Predict 2.5 (text) | 0.6668 | 0.4501 | 0.3126 | 0.5911 | 0.4302 | 0.7882 | 0.7488 | 0.8511 | 0.1383 |
| Cosmos-Predict 2.5 (action) | 0.4489 | 0.3576 | 0.9296 | 0.3994 | 0.0573 | 0.7100 | 0.8197 | 0.8894 | 0.3528 |
| CtrlWorld | 0.3522 | 0.3893 | 0.9185 | 0.4257 | 0.3449 | 0.7377 | 0.8411 | 0.9057 | 0.1729 |
| Wan 2.2 | 0.3884 | 0.3963 | 0.7575 | 0.4349 | 0.1269 | 0.7019 | 0.8388 | 0.9042 | 0.4776 |
| CogvideoX | 0.3582 | 0.3777 | 0.9384 | 0.3166 | 0.2189 | 0.7391 | 0.8083 | 0.8773 | 0.3580 |
| IRASim | 0.3489 | 0.3623 | 0.9330 | 0.4139 | 0.2083 | 0.7052 | 0.8312 | 0.9068 | 0.3522 |
| Veo 3.1 | 0.6605 | 0.4632 | 0.5694 | 0.5450 | 0.1396 | 0.6989 | 0.7878 | 0.8710 | 0.3247 |
| Wan 2.6 | 0.6824 | 0.4433 | 0.7229 | 0.7421 | 0.4532 | 0.8539 | 0.7517 | 0.8687 | 0.1904 |
Physics and 3D and Controllability Metrics
| Model | Interaction | Trajectory | Depth | Perspectivity | Instruction | Semantic | Action |
|---|---|---|---|---|---|---|---|
| Worldscape-MoE | 0.8008 | 0.4610 | 0.9030 | 0.9686 | 0.9348 | 0.9039 | 0.0955 |
| w/o MoE | 0.7622 | 0.3540 | 0.9038 | 0.9744 | 0.8703 | 0.8914 | 0.0324 |
| GigaWorld-0 | 0.5368 | 0.1552 | 0.6316 | 0.7596 | 0.6156 | 0.8591 | 0.1134 |
| TesserAct | 0.5800 | 0.1396 | 0.7159 | 0.7920 | 0.6152 | 0.8783 | 0.0311 |
| RoboMaster | 0.5364 | 0.1158 | 0.8335 | 0.7588 | 0.5772 | 0.8761 | 0.0352 |
| Vidar | 0.5348 | 0.1928 | 0.7872 | 0.7592 | 0.5912 | 0.8826 | 0.0819 |
| Cosmos-Predict 2.5 (text) | 0.3872 | 0.0816 | 0.7051 | 0.7964 | 0.2664 | 0.7733 | 0.1418 |
| Cosmos-Predict 2.5 (action) | 0.5500 | 0.2945 | 0.8862 | 0.7644 | 0.5840 | 0.8879 | 0.0133 |
| CtrlWorld | 0.6212 | 0.4766 | 0.9300 | 0.7960 | 0.7272 | 0.8912 | 0.0210 |
| Wan 2.2 | 0.5184 | 0.1627 | 0.7768 | 0.7660 | 0.5376 | 0.8877 | 0.0512 |
| CogvideoX | 0.5940 | 0.3526 | 0.9097 | 0.7828 | 0.7268 | 0.8977 | 0.0076 |
| IRASim | 0.5656 | 0.3639 | 0.9312 | 0.7788 | 0.6604 | 0.8849 | 0.0526 |
| Veo 3.1 | 0.7872 | 0.1231 | 0.7421 | 0.8276 | 0.9328 | 0.8607 | 0.0852 |
| Wan 2.6 | 0.7280 | 0.1182 | 0.7144 | 0.8032 | 0.8536 | 0.8728 | 0.0992 |
Citation
@article{worldscape_moe_2026,
title = {Worldscape-MoE: A Unified Mixture-of-Experts World Model for Scalable Heterogeneous Action Control},
author = {Worldscape Team},
journal = {Under Review},
year = {2026}
}